
A framework to improve air-ground robot navigation in complex occlusion-prone environments
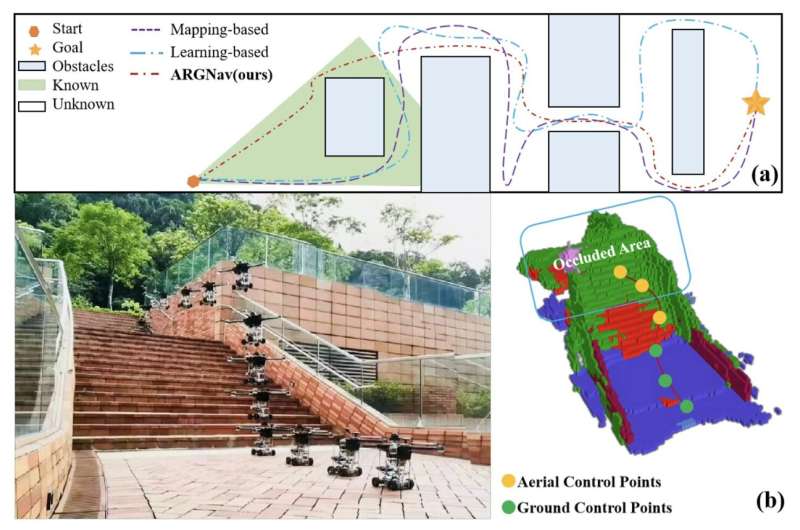
Editors’ notes This article has been reviewed according to Science X’s editorial process and policies. Editors have highlighted the following attributes while ensuring the content’s credibility: fact-checked preprint trusted source proofread by Ingrid Fadelli , Tech Xplore (a) Previous navigation systems...
