DeepMind demonstrates a robot capable of giving context-based guided tours of an office building
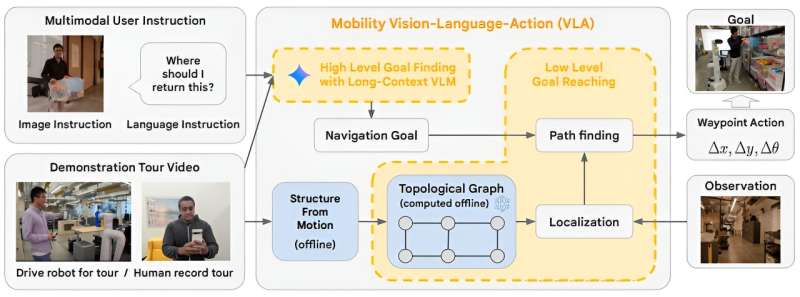
Mobility VLA architecture. The multimodal user instruction and a demonstration tour video of the environment are used by a long-context VLM (high-level policy) to identify the goal frame in the video. The low-level policy then uses the goal frame and...